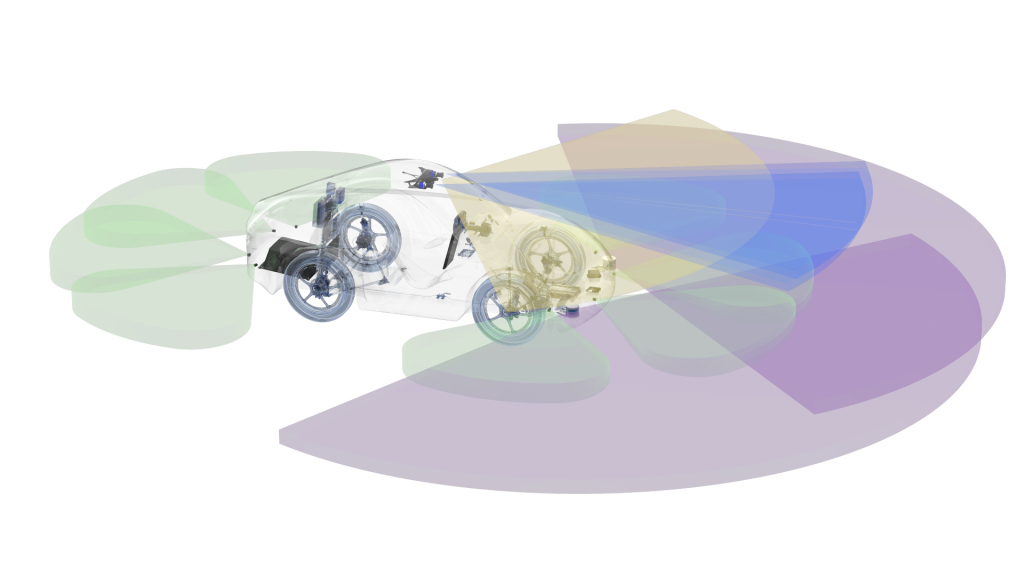
Nach dem sehr erfolgreichen Debüt unseres ersten Urban Concepts letztes Jahr, haben wir uns direkt im Anschluss an eine weitere Herausforderung gewagt. Mit muc018 präsentieren wir zum ersten Mal in der Geschichte des TUfast Eco Teams ein autonom fahrendes Fahrzeug.
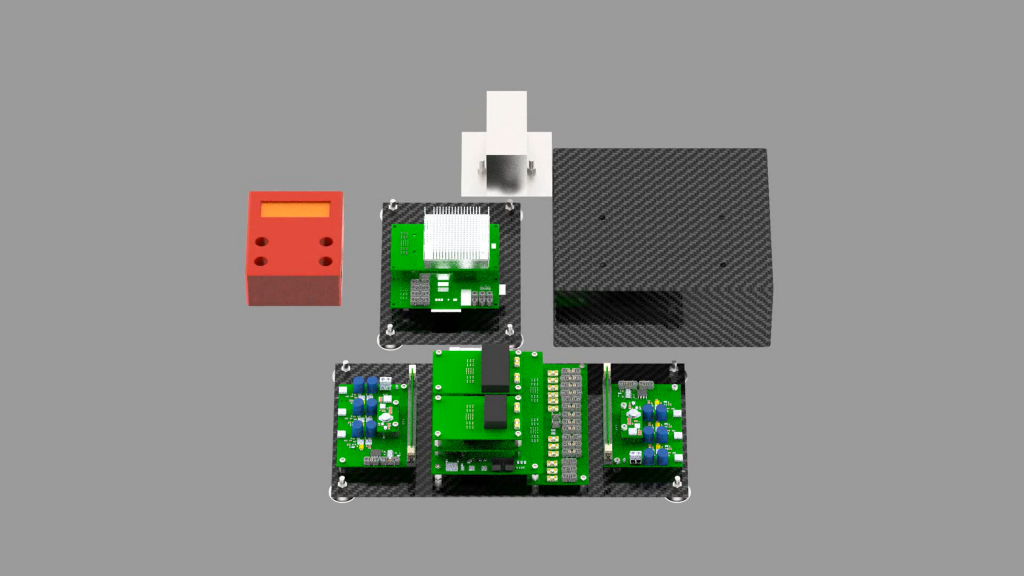
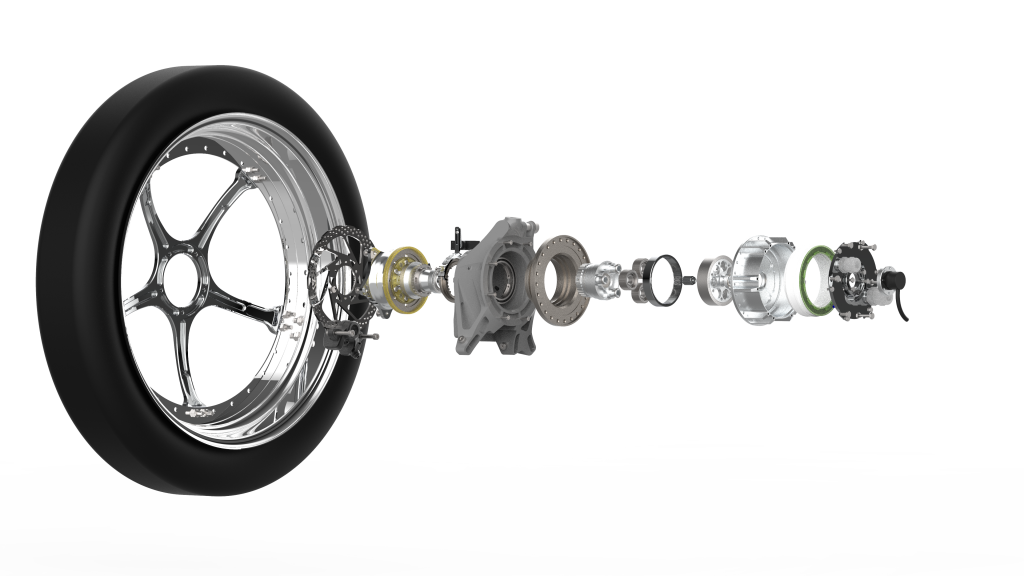
Bei muc018 lag der Fokus komplett auf der Entwicklung eines integrativen und innovativen Fahrzeugkonzepts. Die Komponenten des autonomen Systems sind vollständig modular und können für die klassischen Wettbewerbe mit Fahrer komplett entnommen werden und stellen daher kein zusätzliches Gewicht dar. In der Entwicklung und Fertigung wurde das autonome System als gleichwertiger Bestandteil des Fahrzeugs wahrgenommen und daher besonders darauf geachtet, eine vollständige und trotzdem reversible Integration in muc018 zu bewerkstelligen. Wir konnten unseren Ansatz beim Shell Eco-marathon erfolgreich validieren hier.
Wie auch der Vorgänger muc017 tritt muc018 in der Urban Concept Klasse des Shell Eco-marathons an und kann daher neben Effizienz mit Beleuchtung, Wetterfestigkeit, angenehmer Sitzposition und Gepäcktransportmöglichkeit aufwarten.