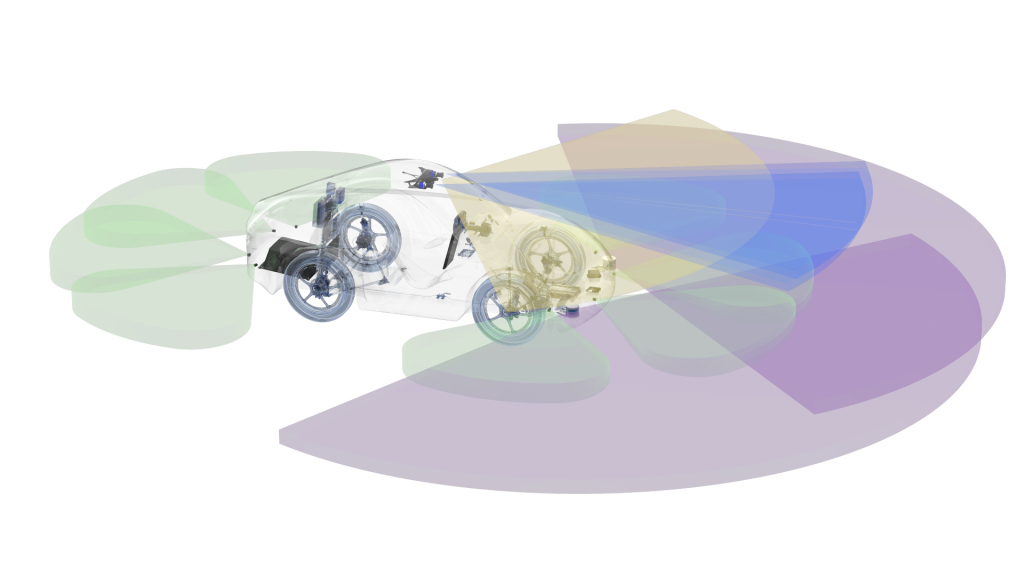
After the very successful debut of our first Urban Concept last year, we focused on the next challenge for our team. With muc018 we presented for the first time in the history of the TUfast Eco Team an autonomous driving vehicle.
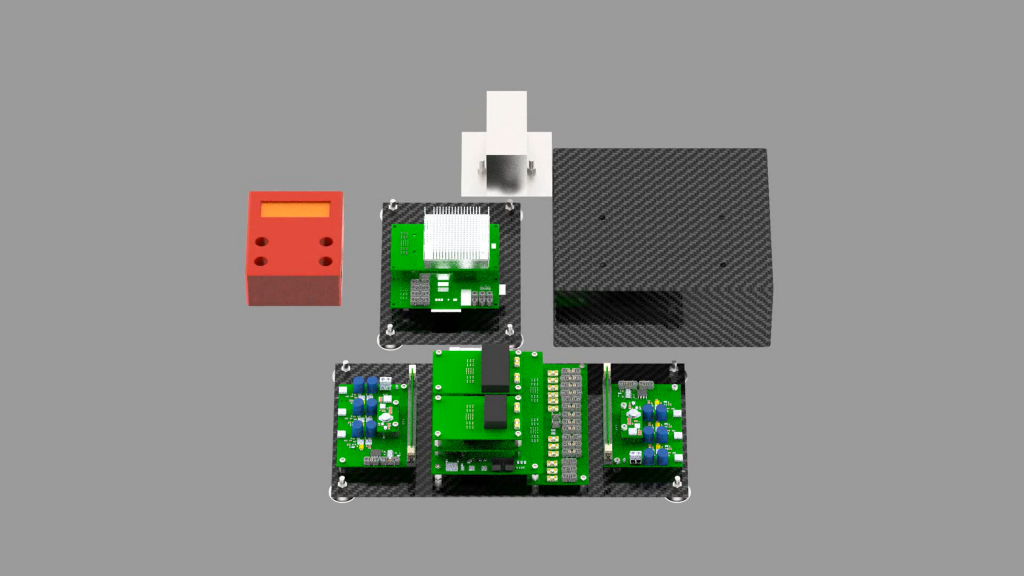
Our focus was mainly on developing an integrative and innovative vehicle concept. The autonomous components are completely modular and can be fully removed for the traditional competition where a normal driver is steering muc018. They do not present any additional weight. While developing and manufacturing the muc018, the autonomous system was perceived as an equally important part of the vehicle. Therefore, special attention was given to the complete but nonetheless reversible integration of all components into muc018. We could successfully validate our approach at the Shell Eco-marathon here.
Just like its predecessor muc017 our new car muc018 will compete at the Shell Eco-marathon in the Urban Concept class and in addition to its efficiency it will also feature lighting, weather resistance, comfortable sitting position, and a baggage compartment.