OUR VEHICLE FROM 2020
As of 2018 driverless disciplines have been introduce into the Shell Eco Marathon. Since its inception, TUfast Eco Team have sought to develop an autonomous vehicle. This materialized into the creation of the muc018, where an autonomous driving system was successfully integrated into the vehicle for the first time, and in the same year the TUfast Eco Team achieved second place in the autonomous category of the SEM.
The goal of the current season is to equip the latest car with a more robust autonomous system able to fulfill more demanding tasks. To accomplish such an interdisciplinary project, there must be seamless interaction between the software and hardware of the autonomous system.
For example, it is of the utmost importance to install the appropriate actuators. Furthermore, a steering motor and an autonomous braking system must be incorporated into muc019. The precision of the calibration of the motors and their controls are of particular importance. The prior calculations for the trajectory of the vehicle must also be traced as accurately as possible. Therefore, it is of great significance to consider the dynamics of the car, to ensure that the vehicle behaves as intended, irrespective of external influences.
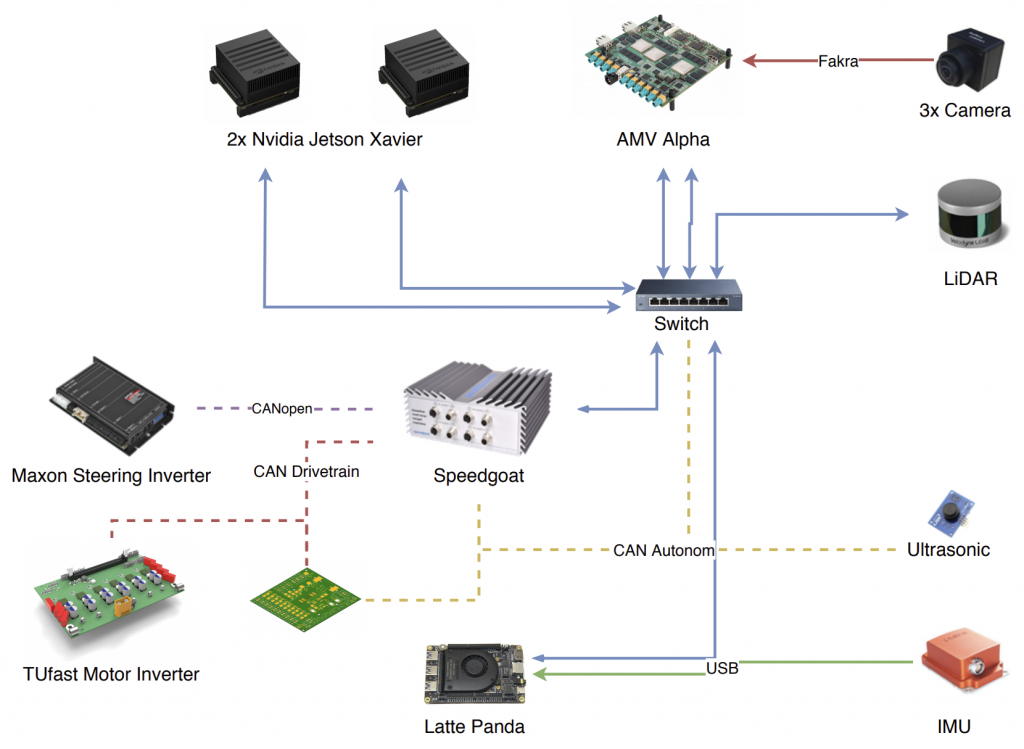
The continuous development towards muc019+, as we have christened our project, is already in full swing. The fusion of a highly efficient design with autonomous functionality through clever packaging is being refined. In addition, muc019+ will be fitted with various environmental sensors. Three cameras mounted on the roof of the vehicle form the main component of the environmental sensors. One camera will be fitted with a 190-degree wide-angle lens, capable of overseeing the entire front-area of the car. The other two cameras, together form a stereo camera, which estimates the distances to objects in front of the vehicle
The LiDAR sensor positioned on the bonnet, outputs a 3D point cloud environment. The sensor is placed in such a way to cover all objects in front of the vehicle and much of the road ahead.
By using the combination of cameras and LiDAR data we can create a hyper-accurate model of the environment around the car. The image recognition provides information about the object type, and the LiDAR sensor pinpoints the location of the object in the environment.
Additionally, ultrasonic sensors will be installed around the vehicle. These sensors can detect objects at extremely short distances, making it possible to park the autonomous vehicle in a parking space.
The main goal of this season is to participate in both the “Autonomous Urban Concept” and efficiency competitions of the Shell Eco Marathon. The “Autonomous Urban Concept” competition requires the car to independently master various driving disciplines without human intervention, such as driving on a track with pre-defined routes, identifying obstacles or parking.
Key Data
Load-bearing carbon fiber composite monocoque
Length: 2.5m
Mass (ready to drive) in kg
0
Maximum speed in km/h
0
Two electric motors in the steered front axle
Lithium polymer batteries
- Competition battery: has a capacity of 190 Wh and a range of 25km
- Battery for test/ for autonomous operation: has a capacity of 480Wh and a range of 64km
With efficiency value from the Shell Eco Marathon (130.4km/kWh)

Power Train
Motors: permanent-magnet synchronous motors
Self-developed GaN-Inverter
Maintenance-optimized, plug-in PCB design
Cable-reduced design (total 33m)
E-paper memory display as GUI
CAN and Bus for communication between control units
Self-developed motor controller
Communication via CAN
Nominal power in W
(2x430W)
0
Chassis
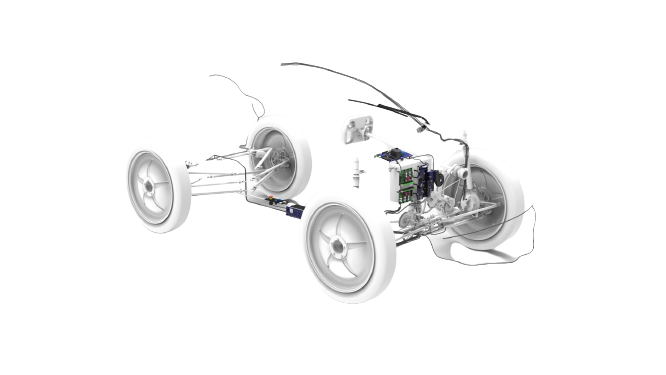
Innovative package, complete drive train and all computing units in the front end, spacious interior and luggage compartment
Entire body in carbon fibre composite construction and use of novel joining methods
Closed and load-optimized monocoque, one-piece sandwich structure
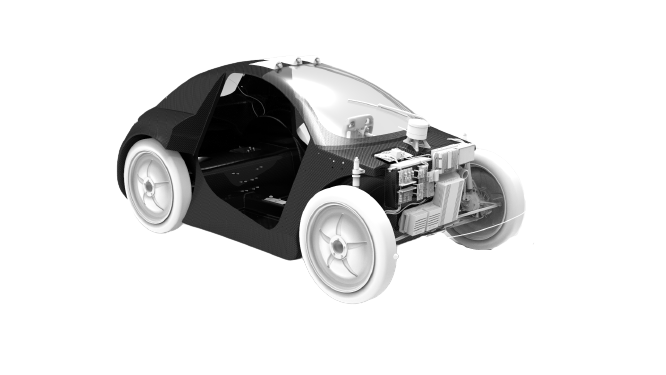
Non-structural, aerodynamic components such as multi-part front end, doors, underbody panelling and rear spoiler
Self-manufactured CFRP-parts with requirement-oriented processes (MTI, VAP, prepreg autoclave)
Suspension System
Uprights optimised for robustness
Organic, topology optimized scalmalloy-uprights
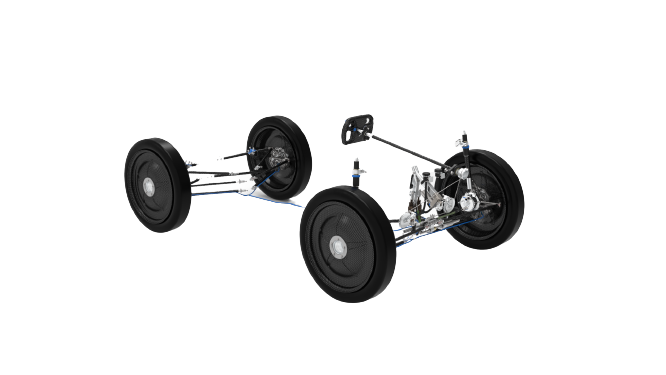
MacPherson front axle with elastokinematic suspension and damping
Double wishbone rear axle with air suspension and hydraulic damping
Cable operated steering system
Four hydraulic disc brakes
Hydraulically controlled autonomous braking system
Spindle driven steering motor for more precise control
Autonomous
Perception bases on sensor fusion
Modular integration into the platform
New components specialized for specific applications
Simplification of the hardware architecture (reduction of components and wiring harness)
Image recognition by means of neural networks trained on computer-generated images
More efficient trajectory planning with better support for dynamic scenarios and more complex manoeuvres
Trajectory following control with state estimation for precise execution of the planned trajectory
More extensive testing through the use of continuous integration and multiple Simulation Pipelines
Self-developed steering and brake actuators