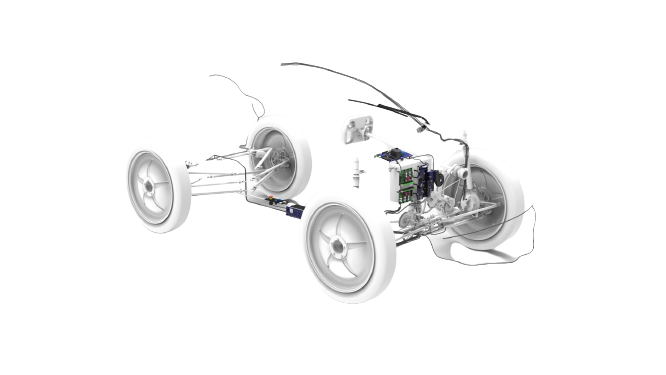
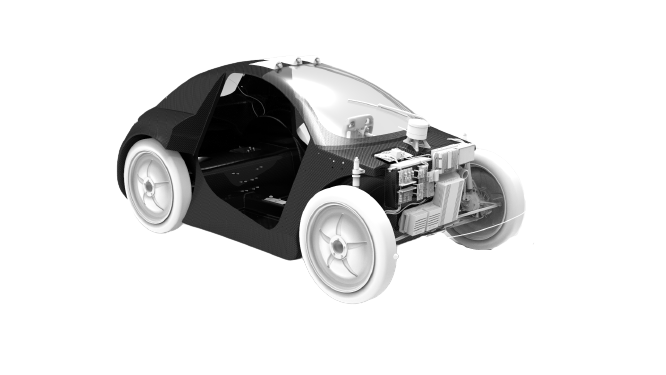
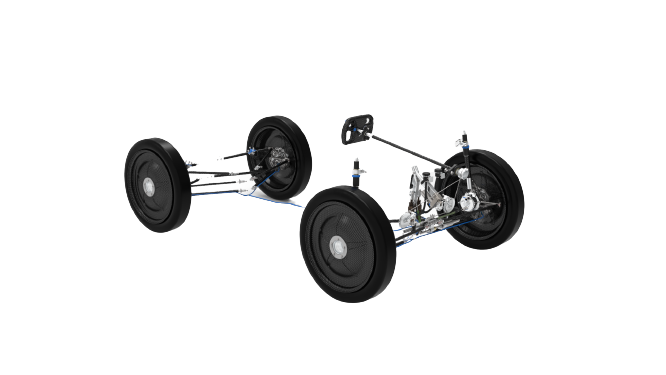
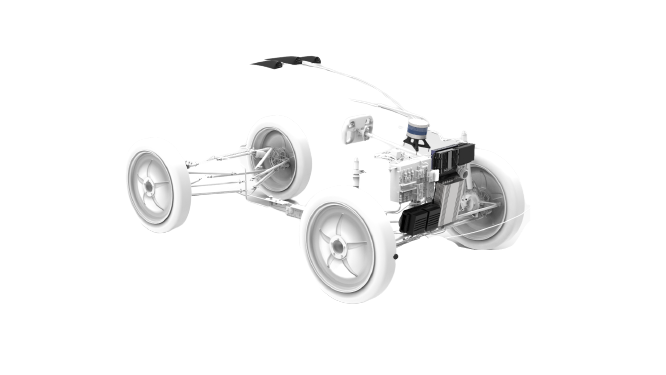
Urban mobility of tomorrow – this topic is currently at the centre of society. With the vehicle muc019, the student team of the TU Munich contributes its ideas and possibilities for electric mobility.
Following the two successful Urban Concept cars muc017 & muc018, the latest model offers the first two-seater with a vehicle weight far below 100kg, designed for urban traffic of approx. 50km/h. Based on muc018, a modular, autonomous system was also planned here to allow for future developments. This combines efficiency, suitability for everyday use and technical innovation in one vehicle and shows what our mobility could look like in the future.